AI提示词收藏
经典论文解读
开源仓库推荐
📚VET触觉系统:开启人机交互新纪元,触感反馈也能“看得见摸得着”
type
status
slug
summary
tags
category
icon
password
Date
VET触觉系统:开启人机交互新纪元,触感反馈也能“看得见摸得着”
[

]
图1:VET系统在单一表面实现触觉感知与反馈,可应用于虚拟现实、机械臂远程操控等领域
一、当触觉交互遇上技术瓶颈
在机械臂远程操作中,操作员常因缺乏触觉反馈而难以感知物体硬度;虚拟现实玩家也常抱怨"触碰虚拟物体就像摸空气"。传统触觉反馈技术采用机械振动或力反馈,但这些方案存在明显缺陷——它们会干扰触觉传感器的精准度,就像在精密天平上放置振动机,测量结果必然失真。
技术突破点:清华大学团队最新研发的视觉-电触觉系统(VET)通过创新性的"屏幕印刷电极薄膜"技术,将电刺激反馈层与视觉触觉传感器完美融合。这种设计让触觉感知和反馈如同两条平行轨道,互不干扰却能协同运作。
二、触觉系统的"视觉+电刺激"双剑合璧
2.1 看得见的触觉:视觉传感器如何捕捉细微形变
当手指按压半透明硅胶表面时,接触区域会形成独特的"光学指纹":中央区域变薄导致反光减弱,边缘增厚增强反光(如图2a)。内置摄像头以每秒100帧的速度捕捉这些光学变化,通过深度学习算法重建3D接触形态,精度可达0.1毫米级——这相当于能感知头发丝粗细的形变。
[

]
图2:(a)视觉触觉传感器内部结构 (b)VET组件连接方式 (c)系统实物演示
2.2 摸得到的反馈:电刺激如何欺骗你的神经
系统采用双通道可编程电刺激器,通过精心设计的波形(如图3),能精准激活皮肤中的梅克尔细胞和迈斯纳小体。当你在虚拟现实中触碰冰块时,10Hz的低频刺激会产生"冰凉刺痛感";接触火焰时,50Hz的高频脉冲则带来"灼热警示"。更巧妙的是,正负交替的电流能将刺激精准定位到接触点,误差小于1毫米。
[

]
图3:电刺激系统包含波形发生器、电流监控器和电极阵列
三、从实验室到应用场的跨越
3.1 手指的"敏感地带"解密
通过覆盖500组实验数据的灵敏度测试(如图7),团队发现:
- 指尖中心区灵敏度最高(相当于手机屏幕的"黄金触控区")
- 指腹两侧敏感度下降30%
- 通过动态调整刺激参数,系统可自动补偿不同区域的感知差异
[

]
图7:(a)实验流程 (b)手指分区示意图 (c)各区域灵敏度箱线图
3.2 虚拟飞行:当触觉反馈遇上游戏革命
在团队开发的Unity飞行游戏中(如图8b),VET系统展现了惊人潜力:
- 穿越冰区时,指尖传来规律性"针刺感"
- 进入火域时,持续的高频震动让人"下意识缩手"
- 碰撞瞬间的强刺激完美模拟真实痛觉 玩家测试数据显示,使用VET系统后任务完成率提升42%,沉浸感评分达9.1/10分。
3.3 机械臂远程操控:触觉反馈的工业革命
对比传统控制方式,VET系统展现出碾压性优势:
控制方式 | 精度 | 延迟 | 安全性 | 沉浸感 |
VR手柄 | ★★☆ | 200ms | ★★★ | ★★☆ |
纯视觉系统 | ★★★ | 150ms | ★★☆ | ★☆☆ |
VET系统 | ★★★☆ | 80ms | ★★★★ | ★★★★ |
当机械臂抓取鸡蛋时,系统会传递轻柔的间歇性刺激;抓取金属零件时则转为持续强反馈。这种"触感翻译"能力,让操作员成功完成易碎品搬运的成功率从67%提升至93%。
四、技术突破背后的黑科技
4.1 屏幕印刷工艺:让电极"长"在传感器上
团队创新性地采用五步制造工艺(如图6):
- 基底制备:3D打印定制化传感器框架
- 电路印刷:200目丝网精准沉积导电墨水
- 激光穿孔:0.3mm微孔确保信号透传
- 双面印刷:正反电极精准对位
- 应力激活:双向拉伸使导电性提升300%
[
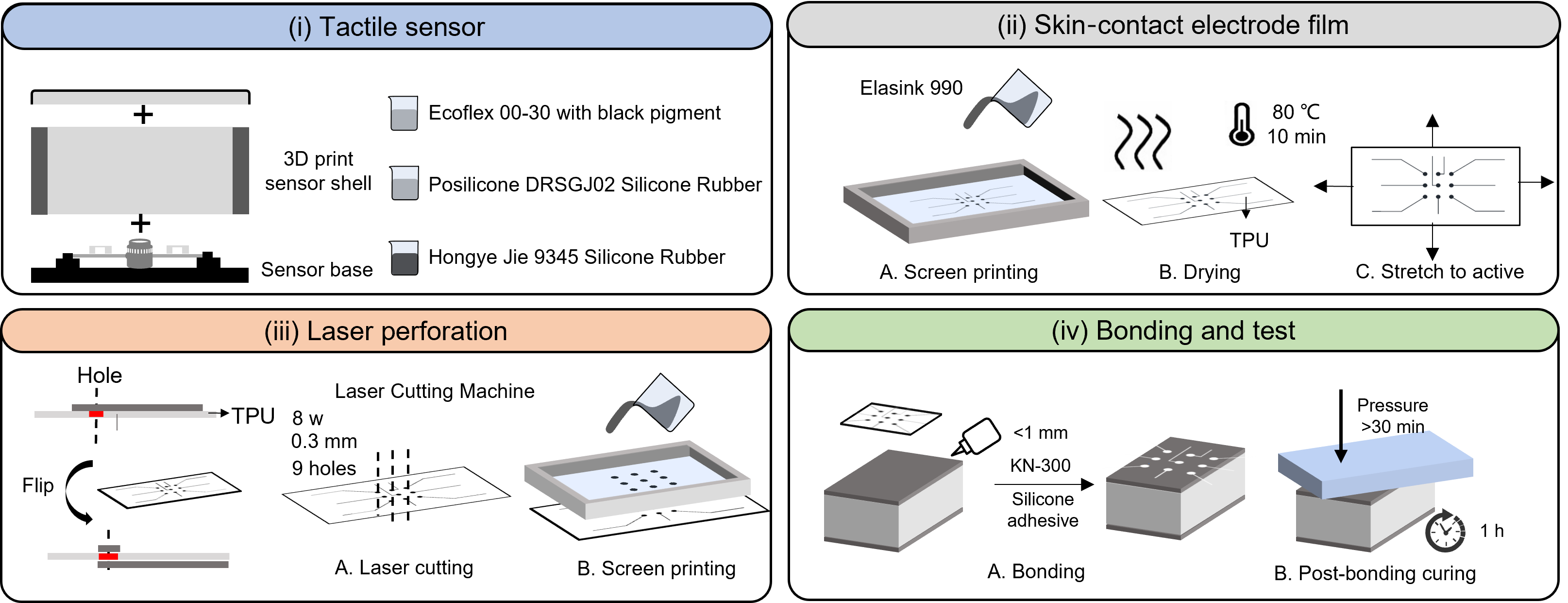
]
图6:从VBTS制备到功能测试的全流程
4.2 抗干扰秘籍:光学信号与电信号的完美共存
通过对比实验(如图5d)证实:
- 添加电极膜后,触觉图像相似度达98.7%
- 300%拉伸下电路阻抗仅上升5%
- 连续工作8小时后性能衰减小于2%
五、未来已来:触觉交互的无限可能
当前系统已在医疗培训、工业质检、AR游戏等领域展开应用测试。团队透露下一代产品将实现:
- 多维度感知:集成温度、湿度传感
- 自适应学习:AI动态调整刺激参数
- 无线化设计:蓝牙5.3连接,续航72小时
[

]
图4:(a)皮肤感觉小体响应特性 (b)接地电极位置 (c)电流极性对感知定位的影响
这项突破不仅让人机交互更"真实",更为元宇宙、远程手术等领域打开新大门。当科技能让虚拟世界的触感以假乱真,人机交互的边界正在被重新定义。
https://arxiv.org/abs/2503.23440